ПЛЮСЫ И МИНУСЫ МНОГОФАЗНЫХ ИМПУЛЬСНЫХ РЕГУЛЯТОРОВ НАПРЯЖЕНИЯ ПИТАНИЯ
Как известно, питание всех компонентов материнских плат (процессора, чипсета, модулей памяти и т.д.) осуществляется от блока питания, который подключается к специальному разъему на материнской плате. Напомним, что на любой современной материнской плате имеется 24-контактный ATX-разъем питания, а также дополнительный 4- (ATX12V) или 8-контактный (EPS12V) разъем питания. Все блоки питания генерируют постоянное напряжение номиналом ±12, ±5 и +3,3 В, однако понятно, что различные микросхемы материнских плат требуют постоянного напряжения иных номиналов (причем разные микросхемы требуют различного напряжения питания), а потому возникает задача преобразования и стабилизации постоянного напряжения, получаемого от источника питания, в постоянное напряжение, требуемое для питания определенной микросхемы материнской платы (преобразование DC-DC). Для этого в материнских платах используются соответствующие конверторы (преобразователи) напряжения, которые понижают номинальное напряжение источника питания до необходимого значения. Существует два типа конверторов постоянного напряжения DC-DC: линейный (аналоговый) и импульсный. Линейные конверторы напряжения на материнских платах сегодня уже не встречаются. В этих конверторах понижение напряжения производится за счет падения части напряжения на резистивных элементах и рассеивания части потребляемой мощности в виде тепла. Такие конверторы снабжались мощными радиаторами и сильно грелись. Однако с ростом мощности (а соответственно, и токов), потребляемой компонентами материнских плат, от линейных преобразователей напряжения были вынуждены отказаться, поскольку возникала проблема их охлаждения. Во всех современных материнских платах используются импульсные преобразователи постоянного напряжения, которые нагреваются гораздо меньше по сравнению с линейными. Понижающий импульсный преобразователь постоянного напряжения для питания процессора часто называют модулем VRM (Voltage Regulation Module — модуль регулирования напряжения) или VRD (Voltage Regulator Down — модуль понижения напряжения). Разница между VRM и VRD заключается в том, что модуль VRD расположен непосредственно на материнской плате, а VRM представляет собой внешний модуль, устанавливаемый в специальный слот на материнской плате. В настоящее время внешние VRM-модули практически не встречаются и все производители применяют VRD-модули. Однако само название VRM так прижилось, что стало общеупотребительным и теперь его используют даже для обозначения VRD-модулей. Импульсные регуляторы напряжения питания, применяемые для чипсета, памяти и других микросхем материнских плат, не имеют своего специфического названия, однако по принципу действия они ничем не отличаются от VRD. Разница заключается лишь в количестве фаз питания и выходном напряжении. Как известно, любой преобразователь напряжения характеризуется входным и выходным напряжением питания. Что касается выходного напряжения питания, то оно определяется конкретной микросхемой, для которой используется регулятор напряжения. А вот входное напряжение может быть либо 5, либо 12 В. Ранее (во времена процессоров Intel Pentium III) для импульсных регуляторов напряжения питания применялось входное напряжение 5 В, однако впоследствии производители материнских плат стали все чаще использовать входное напряжение 12 В, и в настоящее время на всех платах в качестве входного напряжения импульсных регуляторов напряжения применяется напряжение питания 12 В. Принцип действия однофазного импульсного регулятора напряжения питания
Прежде чем переходить к рассмотрению многофазных импульсных регуляторов напряжения питания, рассмотрим принцип действия простейшего однофазного импульсного регулятора напряжения. Компоненты импульсного регулятора напряжения питания Импульсный понижающий преобразователь напряжения питания содержит в своей основе PWM-контроллер (ШИМ-контроллер) — электронный ключ, который управляется PWM-контроллером и периодически подключает и отключает нагрузку к линии входного напряжения, а также индуктивно-емкостной LC-фильтр для сглаживания пульсаций выходного напряжения. PWM — это аббревиатура от Pulse Wide Modulation (широтно-импульсная модуляция, ШИМ). Принцип действия импульсного понижающего преобразователя напряжения следующий. PWM-контроллер создает последовательность управляющих импульсов напряжения. PWM-сигнал представляет собой последовательность прямоугольных импульсов напряжения, которые характеризуются амплитудой, частотой и скважностью (рис. 1). Рис. 1. PWM-сигнал и его основные характеристики Скважностью PWM-сигнала называют отношение промежутка времени, в течение которого сигнал имеет высокий уровень, к периоду PWM-сигнала: = /T. Сигнал, формируемый PWM-контроллером, используется для управления электронным ключом, который периодически, с частотой PWM-сигнала, подключает и отключает нагрузку к линии питания 12 В. Амплитуда PWM-сигнала должна быть такой, чтобы с его помощью можно было управлять электронным ключом. Соответственно на выходе электронного ключа наблюдается последовательность прямоугольных импульсов с амплитудой 12 В и частотой следования, равной частоте PWM-импульсов. Из курса математики известно, что любой периодический сигнал может быть представлен в виде гармонического ряда (ряда Фурье). В частности, периодическая последовательность прямоугольных импульсов одинаковой длительности при представлении в виде ряда будет иметь постоянную составляющую, обратно пропорциональную скважности импульсов, то есть прямо пропорциональную их длительности. Пропустив полученные импульсы через фильтр низких частот (ФНЧ) с частотой среза, значительно меньшей, чем частота следования импульсов, эту постоянную составляющую можно легко выделить, получив стабильное постоянное напряжение. Поэтому импульсные преобразователи напряжения содержат также низкочастотный фильтр, сглаживающий (выпрямляющий) последовательность прямоугольных импульсов напряжения. Структурная блок-схема такого импульсного понижающего преобразователя напряжения показана на рис. 2. Рис. 2. Структурная блок-схема такого импульсного понижающего
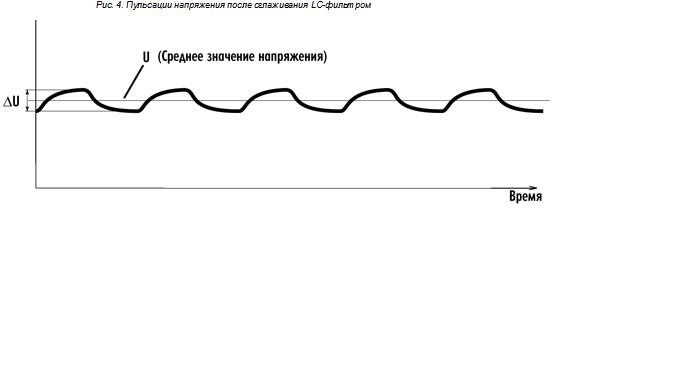
преобразователя напряжения Ну а теперь рассмотрим элементы импульсного понижающего преобразователя напряжения питания более подробно. Электронный ключ и управляющий драйвер В качестве электронного ключа импульсных преобразователей напряжения питания компонентов материнских плат всегда используется пара полевых n-канальных МОП-транзисторов (MOSFET-транзисторы), соединенных таким образом, что сток одного транзистора подключен к линии питания 12 В, исток этого транзистора соединен с точкой выхода и стоком другого транзистора, а исток второго транзистора заземлен. Транзисторы этого электронного ключа (иногда он называется силовой ключ) работают таким образом, что один из транзисторов всегда находится в открытом состоянии, а другой — в закрытом. Для управления переключениями MOSFET-транзисторов управляющие сигналы подаются на затворы этих транзисторов. Управляющий сигнал PWM-контроллера используется для того, чтобы переключать MOSFET-транзисторы, однако этот сигнал подается не непосредственно на затворы транзисторов, а через специальную микросхему, называемую драйвером MOSFET-транзисторов или драйвером фазы питания. Данный драйвер управляет переключением MOSFET-транзисторов на частоте, задаваемой PWM-контроллером, подавая требуемые напряжения переключения на затворы транзисторов. Когда транзистор, подключенный к линии питания 12 В, открыт, второй транзистор, соединенный через свой сток с истоком первого транзистора, закрыт. В этом случае линия питания 12 В оказывается подключенной к нагрузке через сглаживающий фильтр. Когда транзистор, подключенный к линии питания 12 В, закрыт, второй транзистор открыт и линия питания 12 В оказывается отключенной от нагрузки, но нагрузка в этот момент соединена через сглаживающий фильтр с землей. Низкочастотный LC-фильтр Сглаживающий, или низкочастотный, фильтр представляет собой LC-фильтр, то есть индуктивность, включенную последовательно с нагрузкой, и емкость, включенную параллельно нагрузке (рис. 3). Рис. 3. Схема однофазного импульсного преобразователя напряжения Как известно из курса физики, если на вход такого LC-фильтра подать гармонический сигнал определенной частоты Uвх(f), то напряжение на выходе фильтра Uвых(f) зависит от реактивных сопротивлений индуктивности (ZL = j2 fC) и конденсатора Zc = 1/(j2 fC). Коэффициент передачи такого фильтра K(f) = (Uвых(f))/(Uвх(f)) можно рассчитать, рассматривая делитель напряжения, образованный частотно-зависимыми сопротивлениями. Для ненагруженного фильтра получим: K(f) = Zc/(Zc + ZL) = 1/(1 – (2 f)2LC) Или, если ввести обозначение f0 = 2 / , то получим: K(f) = 1/(1 – (f/f0)2) Из данной формулы видно, что коэффициент передачи ненагруженного идеального LC-фильтра неограниченно растет с приближением к частотеf0, а затем, при f>f0, убывает пропорционально 1/f2. На низких частотах (ff0) — к нулю. Поэтому частоту f0 называют частотой среза фильтра. Как уже отмечалось, сглаживание импульсов напряжения с помощью LC-фильтра необходимо, чтобы частота среза фильтра f0 = 2 / была значительно меньшей, чем частота следования импульсов напряжения. Данное условие позволяет подобрать необходимые емкость и индуктивность фильтра. Впрочем, отвлечемся от формул и попытаемся объяснить принцип действия фильтра на более простом языке. В тот момент, когда силовой ключ открыт (транзистор Т1 открыт, транзистор Т2 закрыт), энергия от входного источника передается в нагрузку через индуктивность L, в котором при этом накапливается энергия. Ток, протекающий при этом по цепи, изменяется не мгновенно, а постепенно, поскольку возникающая в индуктивности ЭДС препятствует изменению тока. Одновременно с этим заряжается и конденсатор, установленный параллельно нагрузке. После того как силовой ключ закрывается (транзистор Т1 закрыт, транзистор Т2 открыт), ток от линии входного напряжения не поступает в индуктивность, но по законам физики возникающая ЭДС индукции поддерживает прежнее направление тока. То есть в этот период ток в нагрузку поступает от индуктивного элемента. Для того чтобы цепь замкнулась и ток пошел на сглаживающий конденсатор и в нагрузку, открывается транзистор T2, обеспечивая замкнутую цепь и протекание тока по пути индуктивность — емкость и нагрузка — транзистор T2 — индуктивность. Как уже отмечалось, с помощью такого сглаживающего фильтра можно получить напряжение на нагрузке, пропорциональное скважности управляющих PWM-импульсов. Однако понятно, что при таком способе сглаживания выходное напряжение будет иметь пульсации напряжения питания относительного некоторого среднего значения (выходного напряжения) — рис. 4. Величина пульсаций напряжения на выходе зависит от частоты переключения транзисторов, значения емкости и индуктивности. Рис. 4. Пульсации напряжения после сглаживания LC-фильтром Стабилизация выходного напряжения и функции PWM-контроллера Как уже отмечалось, выходное напряжение зависит (при заданной нагрузке, частоте, индуктивности и емкости) от скважности PWM-импульсов. Поскольку ток через нагрузку динамически изменяется, возникает задача стабилизации выходного напряжения. Делается это следующим образом. PWM-контроллер, формирующий сигналы переключения транзисторов, связан с нагрузкой петлей обратной связи и постоянно отслеживает выходное напряжение на нагрузке. Внутри PWM-контроллера генерируется референсное напряжение питания, которое должно быть на нагрузке. PWM-контроллер постоянно сравнивает выходное напряжение с референсным, и если возникает рассогласование U, то данный сигнал рассогласования используется для изменения (корректировки) скважности PWM-импульсов, то есть изменение скважности импульсов ~ U. Таким образом реализуется стабилизация выходного напряжения. Естественно, возникает вопрос: каким образом PWM-контроллер узнает о требуемом напряжении питания? К примеру, если говорить о процессорах, то, как известно, напряжение питания разных моделей процессора может быть различным. Кроме того, даже для одного и того же процессора напряжение питания может динамически изменяться в зависимости от его текущей загрузки. О требуемом номинальном напряжении питания PWM-контроллер узнает по сигналу VID (Voltage Identifier). Для современных процессоров Intel Core i7, поддерживающих спецификацию питания VR 11.1, сигнал VID является 8-битным, а для устаревших процессоров, совместимых со спецификацией VR 10.0, сигнал VID был 6-битным. 8-битный сигнал VID (комбинация 0 и 1) позволяет задать 256 различных уровней напряжения процессора. Ограничения однофазного импульсного регулятора напряжения питания Рассмотренная нами однофазная схема импульсного регулятора напряжения питания проста в исполнении, однако имеет ряд ограничений и недостатков. Если говорить об ограничении однофазного импульсного регулятора напряжения питания, то оно заключается в том, что и MOSFET-транзисторы, и индуктивности (дроссели), и емкости имеют ограничение по максимальном току, который через них можно пропускать. К примеру, для большинства MOSFET-транзисторов, которые используются в регуляторах напряжения материнских плат, ограничение по току составляет 30 A. В то же время сами процессоры при напряжении питания порядка 1 В и энергопотреблении свыше 100 Вт потребляют ток свыше 100 A. Понятно, что если при такой силе тока использовать однофазный регулятор напряжения питания, то его элементы просто «сгорят». Если говорить о недостатке однофазного импульсного регулятора напряжения питания, то он заключается в том, что выходное напряжение питания имеет пульсации, что крайне нежелательно. Для того чтобы преодолеть ограничения по току импульсных регуляторов напряжения, а также минимизировать пульсации выходного напряжения, используются многофазные импульсные регуляторы напряжения. Многофазные импульсные регуляторы напряжения
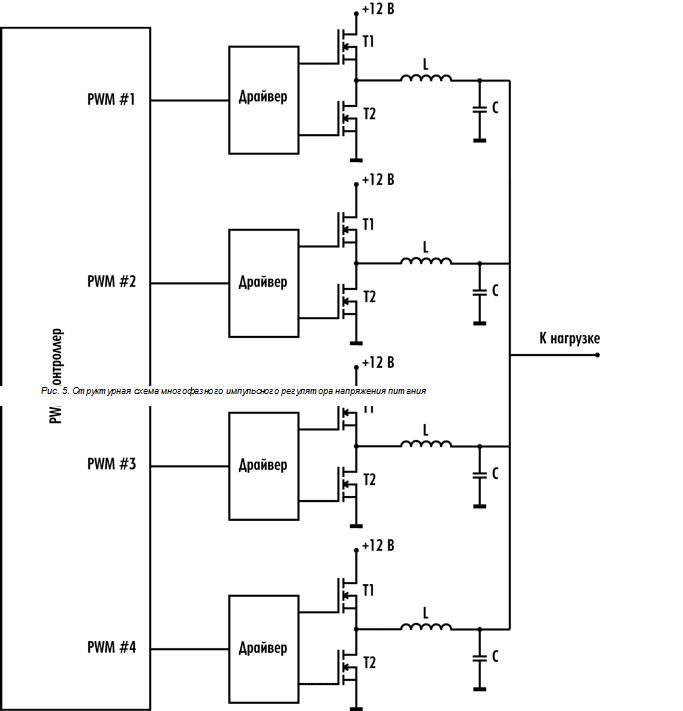
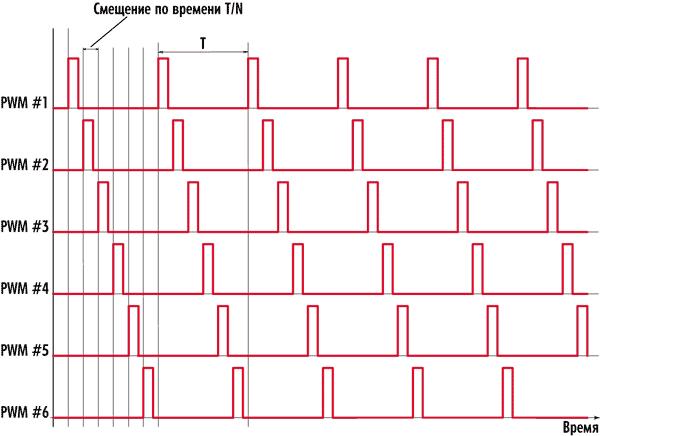
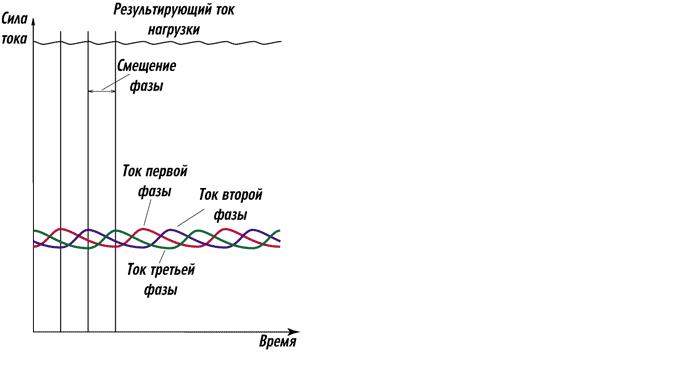
В многофазных импульсных регуляторах напряжения каждая фаза образована драйвером управления переключениями MOSFET-транзисторов, парой самих MOSFET-транзисторов и сглаживающим LC-фильтром. При этом используется один многоканальный PWM-контроллер, к которому параллельно подключается несколько фаз питания (рис. 5). Рис. 5. Структурная схема многофазного импульсного регулятора напряжения питания Применение N-фазного регулятора напряжения питания позволяет распределить ток по всем фазам, а следовательно, ток, протекающий по каждой фазе, будет в N раз меньше тока нагрузки (в частности, процессора). К примеру, если использовать 4-фазный регулятор напряжения питания процессора с ограничением по току в каждой фазе 30 A, то максимальный ток через процессор составит 120 A, чего вполне достаточно для большинства современных процессоров. Однако если используются процессоры с TDP 130 Вт или предполагается возможность разгона процессора, то желательно применять не 4-фазный, а 6-фазный импульсный регулятор напряжения питания процессора или же использовать в каждой фазе питания дроссели, конденсаторы и MOSFET-транзисторы, рассчитанные на больший ток. Для уменьшения пульсации выходного напряжения в многофазных регуляторах напряжения все фазы работают синхронно с временным сдвигом друг относительно друга. Если T — это период переключения MOSFET-транзисторов (период PWM-сигнала) и используется N фаз, то временной сдвиг по каждой фазе составит T/N (рис. 6). За синхронизацию PWM-сигналов по каждой фазе с временным сдвигом отвечает PWM-контроллер. Рис. 6. Временные сдвиги PWM-сигналов в многофазном регуляторе напряжения В результате того, что все фазы работают с временным сдвигом друг относительно друга, пульсации выходного напряжения и тока по каждой фазе также будут сдвинуты по временной оси друг относительно друга. Суммарный ток, проходящий по нагрузке, будет складываться из токов по каждой фазе, и пульсации результирующего тока окажутся меньше, чем пульсации тока по каждой фазе (рис. 7). Рис. 7. Ток по каждой фазе
и результирующий ток нагрузки
в трехфазном регуляторе напряжения Итак, основное преимущество многофазных импульсных регуляторов напряжения питания заключается в том, что они позволяют, во-первых, преодолеть ограничение по току, а во-вторых, снизить пульсации выходного напряжения при той же емкости и индуктивности сглаживающего фильтра. Дискретные многофазные схемы регуляторов напряжения и технология DrMOS
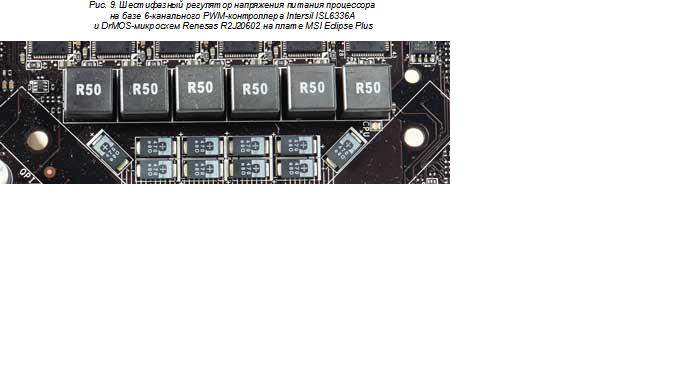
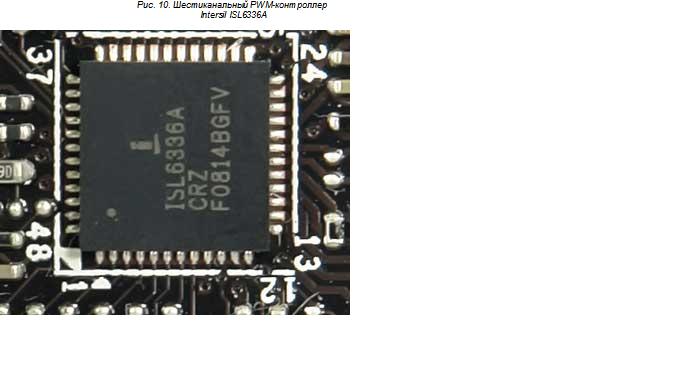
Как мы уже отмечали, каждая фаза питания образована управляющим драйвером, двумя MOSFET-транзисторами, дросселем и конденсатором. При этом один PWM-контроллер одновременно управляет несколькими фазами питания. Конструктивно на материнских платах все компоненты фазы могут быть дискретными, то есть имеется отдельная микросхема драйвера, два отдельных MOSFET-транзистора, отдельный дроссель и емкость. Такой дискретный подход используется большинством производителей материнских плат (ASUS, Gigabyte, ECS, AsRock и т.д.). Однако есть и несколько иной подход, когда вместо применения отдельной микросхемы драйвера и двух MOSFET-транзисторов используется одна микросхема, объединяющая и силовые транзисторы, и драйвер. Данная технология была разработана компанией Intel и получила название DrMOS, которое буквально означает Driver + MOSFETs. Естественно, что при этом также применяются отдельные дроссели и конденсаторы, а для управления всеми фазами служит многоканальный PWM-контроллер. В настоящее время технология DrMOS используется только на материнских платах MSI. Говорить о преимуществах технологии DrMOS в сравнении с традиционным дискретным способом организации фаз питания довольно сложно. Здесь, скорее, все зависит от конкретной DrMOS-микросхемы и ее характеристик. К примеру, если говорить о новых платах MSI для процессоров семейства Intel Core i7, то в них применяется DrMOS-микросхема Renesas R2J20602 (рис. 8). Например, на плате MSI Eclipse Plus используется 6-фазный регулятор напряжения питания процессора (рис. 9) на базе 6-канального PWM-контроллера Intersil ISL6336A (рис. 10) и DrMOS-микросхем Renesas R2J20602. Рис. 8. DrMOS-микросхема Renesas R2J20602 Рис. 9. Шестифазный регулятор напряжения питания процессора
на базе 6-канального PWM-контроллера Intersil ISL6336A
и DrMOS-микросхем Renesas R2J20602 на плате MSI Eclipse Plus Рис. 10. Шестиканальный PWM-контроллер
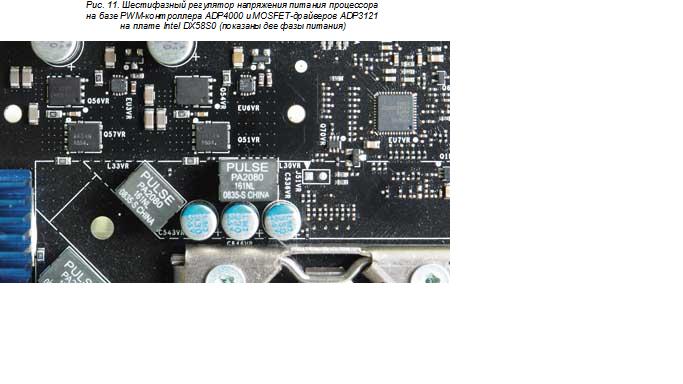
Intersil ISL6336A DrMOS-микросхема Renesas R2J20602 поддерживает частоту переключения MOSFET-транзисторов до 2 МГц и отличается очень высоким КПД. При входном напряжении 12 В, выходном 1,3 В и частоте переключения 1 МГц ее КПД составляет 89%. Ограничение по току — 40 А. Понятно, что при шестифазной схеме питания процессора обеспечивается как минимум двукратный запас по току для DrMOS-микросхемы. При реальном значении тока в 25 А энергопотребление (выделяющееся в виде тепла) самой микросхемы DrMOS составляет всего 4,4 Вт. Также становится очевидным, что при использовании DrMOS-микросхем Renesas R2J20602 нет необходимости применять более шести фаз в регуляторах напряжения питания процессора. Компания Intel в своей материнской плате Intel DX58S0 на базе чипсета Intel X58 для процессоров Intel Core i7 также использует 6-фазный, но дискретный регулятор напряжения питания процессора. Для управления фазами питания применяется 6-канальный PWM-контроллер ADP4000 от компании On Semiconductor, а в качестве MOSFET-драйверов — микросхемы ADP3121 (рис. 11). PWM-контроллер ADP4000 поддерживает интерфейс PMBus (Power Manager Bus) и возможность программирования на работу в режиме 1, 2, 3, 4, 5 и 6 фаз с возможностью переключения числа фаз в режиме реального времени. Кроме того, с помощью интерфейса PMBus можно считывать текущие значения тока процессора, его напряжения и потребляемой мощности. Остается лишь сожалеть, что компания Intel не реализовала эти возможности чипа ADP4000 в утилите мониторинга состояния процессора. Рис. 11. Шестифазный регулятор напряжения питания процессора
на базе PWM-контроллера ADP4000 и MOSFET-драйверов ADP3121
на плате Intel DX58S0 (показаны две фазы питания) Отметим также, что в каждой фазе питания применяются силовые MOSFET-транзисторы NTMFS4834N компании On Semiconductor с ограничением по току в 130 A. Нетрудно догадаться, что при таких ограничениях по току сами по себе силовые транзисторы не являются узким местом фазы питания. В данном случае ограничение по току на фазу питания налагает дроссель. В рассматриваемой схеме регулятора напряжения используются дроссели PA2080.161NL компании PULSE с ограничением по току 40 A, но понятно, что даже при таком ограничении по току вполне достаточно шести фаз питания процессора и имеется большой запас для экстремального разгона процессора. Технология динамического переключения фаз
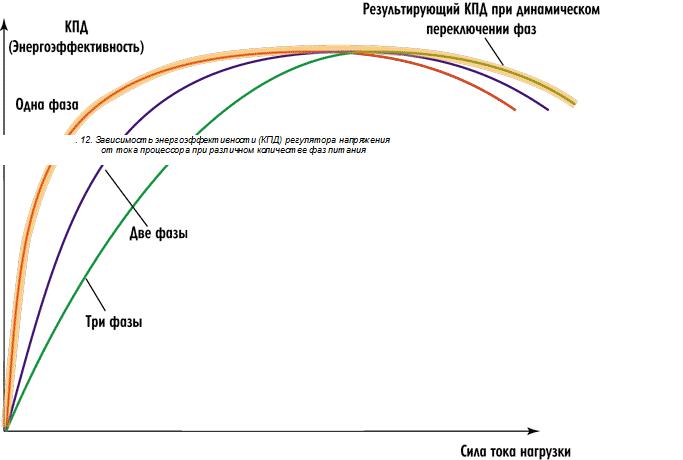
Практически все производители материнских плат в настоящее время используют технологию динамического переключения числа фаз питания процессора (речь идет о платах для процессоров Intel). Собственно, данная технология отнюдь не нова и была разработана компанией Intel уже достаточно давно. Однако, как это часто бывает, появившись, данная технология оказалась невостребованной рынком и долгое время лежала в «запасниках». И только когда идея снижения энергопотребления компьютеров овладела умами разработчиков, вспомнили о динамическом переключении фаз питания процессора. Производители материнских плат пытаются выдать эту технологию за свою фирменную и придумывают ей различные названия. К примеру, у компании Gigabyte она называется Advanced Energy Saver (AES), у ASRock — Intelligent Energy Saver (IES), у ASUS — EPU, у MSI — Active Phase Switching (APS). Однако, несмотря на разнообразие названий, все эти технологии реализованы абсолютно одинаково и, конечно же, не являются фирменными. Более того, возможность переключения фаз питания процессора заложена в спецификацию Intel VR 11.1 и все PWM-контроллеры, совместимые со спецификацией VR 11.1, поддерживают ее. Собственно, у производителей материнских плат выбор здесь небольшой. Это либо PWM-контроллеры компании Intersil (например, 6-канальный PWM-контроллер Intersil ISL6336A), либо PWM-контроллеры компании On Semiconductor (например, 6-канальный PWM-контроллер ADP4000). Контроллеры других компаний применяются реже. Контроллеры и Intersil, и On Semiconductor, совместимые со спецификацией VR 11.1, поддерживают динамическое переключение фаз питания. Вопрос лишь в том, как производитель материнской платы использует возможности PWM-контроллера. Естественно, возникает вопрос: почему технологию динамического переключения фаз питания называют энергосберегающей и какова эффективность ее применения? Рассмотрим, к примеру, материнскую плату с 6-фазным регулятором напряжения питания процессора. Если процессор загружен несильно, а значит, потребляемый им ток невелик, вполне можно обойтись двумя фазами питания, а потребность в шести фазах возникает при сильной загрузке процессора, когда потребляемый им ток достигает максимального значения. Действительно, можно сделать так, чтобы количество задействованных фаз питания соответствовало потребляемому процессором току, то есть чтобы фазы питания динамически переключались в зависимости от загрузки процессора. Но не проще ли использовать все шесть фаз питания при любом токе процессора? Чтобы ответить на этот вопрос, нужно учесть, что любой регулятор напряжения сам потребляет часть преобразуемой им электроэнергии, которая выделяется в виде тепла. Поэтому одной из характеристик преобразователя напряжения является его КПД, или энергоэффективность, то есть отношение передаваемой мощности в нагрузку (в процессор) к потребляемой регулятором мощности, которая складывается из мощности, потребляемой нагрузкой, и мощности, потребляемой самим регулятором. Энергоэффективность регулятора напряжения зависит от текущего значения тока процессора (его загрузки) и количества задействованных фаз питания (рис. 12). Рис. 12. Зависимость энергоэффективности (КПД) регулятора напряжения
от тока процессора при различном количестве фаз питания Зависимость энергоэффективности регулятора напряжения от тока процессора при неизменном количестве фаз питания выглядит следующим образом. Первоначально, с ростом тока нагрузки (процессора), КПД регулятора напряжения линейно возрастает. Далее достигается максимальное значение КПД, а при дальнейшем увеличении тока нагрузки КПД постепенно уменьшается. Главное, что значение тока нагрузки, при котором достигается максимальное значение КПД, зависит от количества фаз питания, а следовательно, если использовать технологию динамического переключения фаз питания, то КПД регулятора напряжения питания всегда можно поддерживать на максимально высоком уровне. Сравнивая зависимости энергоэффективности регулятора напряжения от тока процессора для различного количества фаз питания, можно сделать вывод: при малом токе процессора (при незначительной загрузке процессора) более эффективно задействовать меньшее количество фаз питания. В этом случае меньше энергии будет потребляться самим регулятором напряжения и выделяться в виде тепла. При высоких значениях тока процессора использование малого количества фаз питания приводит к снижению энергоэффективности регулятора напряжения. Поэтому в данном случае оптимально применять большее количество фаз питания. С теоретической точки зрения использование технологии динамического переключения фаз питания процессора должно, во-первых, снизить общее энергопотребление системы, а во-вторых — тепловыделение на самом регуляторе напряжения питания. Причем, по заявлениям производителей материнских плат, данная технология позволяет снизить энергопотребление системы на целых 30%. Конечно же, 30% — это число, взятое с потолка. Реально технология динамического переключения фаз питания позволяет снизить суммарное энергопотребление системы не более чем на 3-5%. Дело в том, что данная технология позволяет экономить электроэнергию, потребляемую лишь самим регулятором напряжения питания. Однако основными потребителями электроэнергии в компьютере являются процессор, видеокарта, чипсет и память, и на фоне суммарного энергопотребления этих компонентов энергопотребление самого регулятора напряжения достаточно мало. А потому, как ни оптимизируй энергопотребление регулятора напряжения, добиться существенной экономии просто невозможно. Маркетинговые «фишки» производителей
На что только не идут производители материнских плат, дабы привлечь к своей продукции внимание покупателей и мотивированно доказать, что она лучше, чем у конкурентов! Одна из таких маркетинговых «фишек» — увеличение фаз питания регулятора напряжения питания процессора. Если раньше на топовых материнских платах применялись шестифазные регуляторы напряжения, то сейчас используют 10, 12, 16, 18 и даже 24 фазы. Действительно ли нужно так много фаз питания, или это не более чем маркетинговый трюк? Конечно, многофазные регуляторы напряжения питания имеют свои неоспоримые преимущества, но всему есть разумный предел. К примеру, как мы уже отмечали, большое количество фаз питания позволяет использовать в каждой фазе питания компоненты (MOSFET-транзисторы, дроссели и емкости), рассчитанные на низкий ток, которые, естественно, дешевле компонентов с высоким ограничением по току. Однако сейчас все производители материнских плат применяют твердотельные полимерные конденсаторы и дроссели с ферритовым сердечником, которые имеют ограничение по току не менее 40 A. MOSFET-транзисторы также имеют ограничение по току не ниже 40 A (а в последнее время наблюдается тенденция перехода на MOSFET-транзисторы с ограничением по току в 75 А). Понятно, что при таких ограничениях по току на каждой фазе волне достаточно применять шесть фаз питания. Такой регулятор напряжения теоретически способен обеспечить ток процессора более 200 А, а следовательно, энергопотребление более 200 Вт. Понятно, что даже в режиме экстремального разгона достичь таких значений тока и энергопотребления практически невозможно. Так зачем же производители делают регуляторы напряжения с 12 фазами и более, если питание процессора в любом режиме его работы способен обеспечить и шестифазный регулятор напряжения? Если сравнивать 6- и 12-фазный регуляторы напряжения, то теоретически при использовании технологии динамического переключения фаз питания энергоэффективность 12-фазного регулятора напряжения будет выше. Однако разница в энергоэффективности будет наблюдаться только при высоких токах процессора, которые на практике недостижимы. Но даже если и удается достичь столь высокого значения тока, при котором будет различаться энергоэффективность 6- и 12-фазного регуляторов напряжения, то эта разница будет столь мала, что ее можно не принимать в расчет. Поэтому для всех современных процессоров с энергопотреблением 130 Вт даже в режиме их экстремального разгона волне достаточно 6-фазного регулятора напряжения. Применение 12-фазного регулятора напряжения не дает никаких преимуществ даже при использовании технологии динамического переключения фаз питания. Зачем же производители начали делать 24-фазные регуляторы напряжения — остается только гадать. Здравого смысла в этом нет, видимо, они рассчитывают произвести впечатление на технически неграмотных пользователей, для которых «чем больше, тем лучше». Кстати, нелишне будет отметить, что сегодня не производится 12- и тем более 24-канальных PWM-контроллеров, управляющих фазами питания. Максимальное количество каналов в PWM-контроллерах равно шести. Следовательно, когда применяются регуляторы напряжения с количеством фаз более шести, производители вынуждены устанавливать несколько PWM-контроллеров, которые работают синхронно. Напомним, что управляющий PWM-сигнал в каждом канале имеет определенную задержку относительно PWM-сигнала в другом канале, но эти временные смещения сигналов реализуются в пределах одного контроллера. Получается, что при применении, к примеру, двух 6-канальных PWM-контроллеров для организации 12-фазного регулятора напряжения фазы питания, управляемые одним контроллером, попарно объединены с фазами питания, управляемыми другим контроллером. То есть первая фаза питания первого контроллера будет работать синхронно (без временного сдвига) с первой фазой питания второго контроллера. Динамически переключаться фазы будут, скорее всего, тоже попарно. В общем, получается не «честный» 12-фазный регулятор напряжения, а скорее гибридная версия 6-фазного регулятора с двумя каналами в каждой фазе.
Добавлять комментарии могут только зарегистрированные пользователи. [ Регистрация | Вход ]
Меню пользователя
Приветствую Вас Гость
Поиск по сайту
Информация
"Круглый стол" по воскресеньям на частоте 3606кГц в 9.00 МСК проводит R3LDQSL бюро работает по пятницам с 18.30 до 20.00 час. г. Смоленск ул. Кирова 22"б" правое крыло 3 этаж (здание ДОСААФ).


 На главную |
На главную |  Регистрация
Регистрация

 Меню сайта
Меню сайта









 Смоленское РО СРР
Смоленское РО СРР Каталоги
Каталоги


 Карты
Карты Он лайн вещание
Он лайн вещание


 Мини-чат
Мини-чат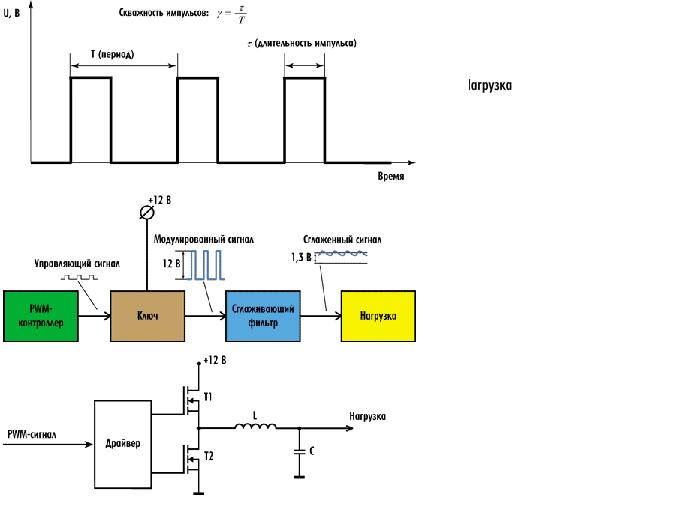

 Поиск по сайту
Поиск по сайту Информация
Информация Статистика
Статистика